 公众号
公众号抗晃电智能交流接触器设计
2011-06-01 16:22:56
- +1 你赞过了
0 引言
晃电作为一种特殊的故障,危害很大,特别是对连续运行的企业。目前抗晃电的方法可归结为如下4 类:
(1) 应用断电延时继电器、电动机再起动器。
通过时序关系,使接触器的主触头在晃电结束后重新吸合( 晃电期间断开),实现电动机再起动。
这种抗晃电方法的特点是在晃电发生期间主触头断开,电压恢复后电动机重起动,电动机重起动产生的冲击电流大,控制回路原理复杂,而且电动机再起动器的成本很高。
(2) 采用储能延时元件对接触器的线圈在晃电期间继续提供能量,保证主触头的吸合。这种抗晃电方式有选型不灵活、选择范围小、增加了控制线路的复杂程度等缺点。
(3) 延时锁扣头装置,在接触器吸合后线圈转入省电模式,靠锁扣头锁扣作用保持主触头的接通状态。晃电发生时,接触器主触头不断开,在进行正常的停机操作后主触头才断开。但这种锁扣头只能与专门设计的特殊接触器配合使用,并且在断电的情况下由锁扣头锁定的主触头断开需要独立的电源。对于> 170 A 的接触器,并没有与之配套的锁扣装置。
(4) 采用双电源供电方式,成本高、线路复杂。目前市面上出现了少量的抗晃电交流接触器产品,但是价格居高,同等容量的抗晃电交流接触器是原交流接触器产品价格的5 倍左右。
因此,本文研发了新型抗晃电智能交流接触器产品,该抗晃电智能交流接触器采用接触器本体和智能控制模块的结构。智能控制模块具有体积紧凑小巧、控制精确、通用性强、成本低等优点;同时,通过对接触器的起动、分断过程进行智能控制,大幅度提高了接触器的机械寿命和电寿命,配合不同的接触器本体,可形成系列抗晃电智能交流接触器产品,具有较高的性价比。
1 工作原理
抗晃电智能交流接触器除了具有智能交流接触器的功能外,还具有抗晃电、远程控制等功能,其控制原理如图1 所示。
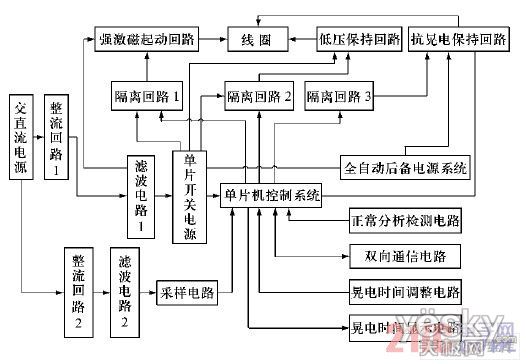
图1 抗晃电智能交流接触器的硬件框图
通过采样电路对电源电压进行采样,当采样电压高于0. 7 Ue( Ue为额定电压值) 且小于1. 15Ue时,单片机控制系统发出信号给隔离回路1,强激磁起动回路接通,接触器高电压起动。单片机给隔离回路2 发出驱动信号,低压保持回路接通,接触器低电压保持,然后驱动回路1 断开,退出运行。
当采样电压低于0. 6 Ue时,视为晃电故障发生,单片机发出信号给隔离回路3 和隔离回路2,先后打开抗晃电保持回路和分断低压保持回路,由全自动后备电源系统对单片机系统和线圈供电,使接触器保持吸合状态,此时采样回路继续对电源电压进行采样,若在规定的时间内,晃电结束,电压恢复正常,则单片机发出信号给隔离回路2 和隔离回路3,先后打开低压保持回路和分断抗晃电保持回路,恢复接触器的正常保持状态,若经N ms(N 可调)电压仍未恢复,则单片机发出信号给隔离回路3,断开抗晃电保持回路,接触器分断。
若电源正常时手动分断接触器,则正常分断检测电路会检测到手动分断信号,此时单片机屏蔽抗晃电程序,使接触器立即分断。
全自动后备电源系统由镍氢充电电池和全自动充电电路组成,当抗晃电模块工作时,充电回路检测电池的电压值,当电压值低于设定最小值时,充电回路开始对电池充电,当电压达到设定最大值时,停止对电池充电,并继续循环检测电池电压值。电源正常时,可通过抗晃电时间调整电路对抗晃电时间进行调整,并显示在两位八段数码管上,单片机自动存储设定的时间,下次启动时,默认加载上次设定值,时间调整范围和调整梯度可根据用户要求设置,当抗晃电时间调到0 时,系统关闭抗晃电功能,作为普通智能接触器使用。
该智能模块可工作在独立和远程两种模式。
独立工作模式时,不具备通信功能,远程工作模式时,可以与上位机双向通信。上位机可对智能控制模块的接通、分断及抗晃电时间进行远程控制和调整,下位机可以将当前接触器的状态、抗晃电时间、有无晃电发生等信号传给上位机。
2 软件设计
本文单片机软件部分采用C 语言进行编程,编译器选用CCS PICC 编译器,该编译器的内部函数比较丰富,支持丰富的外围设备,预备有标准输入/输出函数,编程比较方便,将CCS C 集成到mplab 中使用,进行程序的调试、烧录、运行。
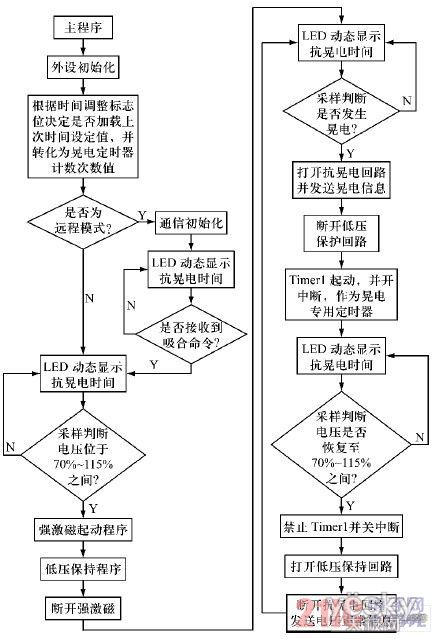
图2 抗晃电智能交流接触器的主程序流程图
软件流程如图2 所示,经过调试后,软件实现了抗晃电智能交流接触器的整体控制功能。完成了接触器的抗晃电初值加载、工作模式判断、阈值判断、正常高压起动、低压保持过程后,开始执行晃电检测程序,循环检测电源电压,检测到晃电,则打开定时器1 作为专用的抗晃电定时器并开中断,利用定时器1 的周期性中断,在定时中断子程序中执行抗晃电延时时间的计时,晃电时间超过设定值时断开抗晃电回路,在设置的抗晃电时间内电源恢复正常,则接触器转入正常保持状态,并继续检测晃电;时间调整子程序采用中断的形式,可对抗晃电时间进行上调或者下调,并把调整后的时间存入E2PROM,以备下次启动时调用。
通信接收程序也采用中断形式,串口调试助手的操作界面如图3所示,可对下位机发送操作指令,进行通断控制及抗晃电时间的调整,并可以实时监测当前接触器的工作状态,文本框用于显示上位机的发送指令和从下位机接收的指令,还可显示当前设置的抗晃电时间和当前接触器的状态值;正常分断检测模块也采用中断的形式,利用单片机内置的* 模块的捕捉功能,捕捉一个正常分断信号后,立即转入中断执行正常分断程序。
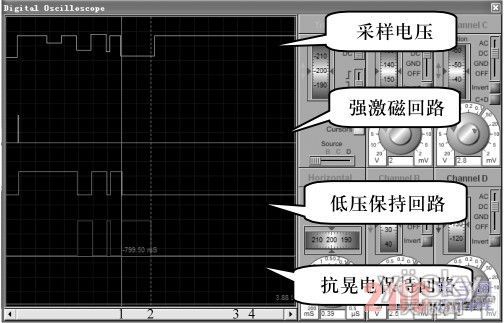
图3 串口调试助手。
3 调试与试验数据
本文选用proteus 软件作为仿真调试工具,proteus 是一款兼容性很高的软件,可以集成到mplab 环境中,由mplab 调用proteus,在mplab 环境中支持断点和单步调试,能反应出程序的运行过程。proteus 中虚拟示波器的仿真波形如图4所示。
图4 proteus 仿真波形。
为了模拟晃电电压,选用一个DC 分段型脉冲激励源接入单片机的RA1 模拟通道,虚拟示波器中第一条曲线表示DC 分段型脉冲激励源,模拟采样电压;第二条表示强激磁回路,第三条表示低压保持回路;第四条表示抗晃电保持回路;竖线①表示采样电压达到阈值,竖线②表示发生晃电时刻,竖线③、④表示电压恢复时刻,由图4 可以看出,DC 脉冲激励源达到阈值后,强激磁回路打开一极短时间(15 ms 左右) 后关闭,继而低压保持回路打开(第三条曲线置高电平),接触器完成正常起动及保持过程;此后电压虽然有波动,但位于晃电界限以上,接触器仍然处于低压保持状态(第三条曲线保持为高电平),本文电源模块采用单片开关电源,具有宽电压输入的特点,因此,即使电压轻微下跌,在实际中仍能输出稳定电压,使实际中的接触器处于稳定的低压保持状态。
如图4 所示,当电压下降到额定值的60%时,即认为发生晃电,此时抗晃电回路打开( 第二条曲线在发生晃电时刻即时刻②置高电平),低压保持回路关闭(第三条曲线发生晃电时刻即时刻②置低电平);当晃电在设定时间内结束电压恢复正常时,低压保持回路打开( 第三条曲线在电压恢复时刻即时刻③置高电平),抗晃电回路关闭(第二条曲线在电压恢复时刻即时刻③置低电平)。在时刻④位置之前的一次晃电,晃电发生时间超过预设的抗晃电延时时间,在整个延时时间范围内,抗晃电保持回路置高电平,延时时间超过预设值后立即跳变为低电平,此时接触器分断。由虚拟示波器的波形图可知该智能控制模块程序具有抗晃电功能。
在此基础上,完成了整体硬件电路的安装与调试。样机硬件实物如图5 所示,可以看出抗晃电智能控制模块由三块PCB 板构成,配合160 A以下的交流接触器可稳定工作。
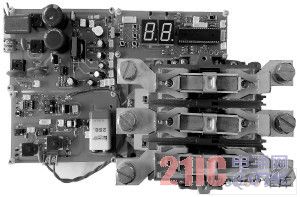
图5 样机硬件实物图。
驱动回路测试波形如图6 所示。图6( a) 和图6(b) 为采样电压波形、强激磁驱动信号、低压保持驱动信号,通过这三条的波形的对比可得出:
系统上电瞬间,采样电压达到吸合阈值,强激磁回路控制端瞬间置高电平,接通强激磁回路,接触器线圈接220 V 高电压,进行吸合动作;吸合过程结束后,低压保持回路控制端置高电平,强激磁回路控制端跳变为低电平,接通低压保持回路,同时断开强激磁起动回路,接触器在低电压下保持吸合状态,完成接触器的高压起动、低压保持过程控制。
图6( c) 中当连续晃电( 第一条曲线电压下跌)且每次晃电时间都在设定值内时,抗晃电回路都能及时打开(第二条曲线在第一条曲线下跌时置高电平),当电压恢复正常时,抗晃电回路又能及时切断(第二条曲线置在第一条曲线电压恢复时置低电平),图6(d) 中,当连续晃电时,低压保持回路与抗晃电回路的信号波形是互补的;当晃电发生且晃电时间在设定值之内时,低压保持回路切断,抗晃电回路打开;当电压恢复时,低压保持回路打开,抗晃电回路切断;图6( d) 中最后一次晃电时,晃电时间超过预设值,低压保持回路切断,抗晃电保持回路打开并且保持到预设时间后切断,此时低压保持回路仍是切除状态,接触器线圈失电,接触器断开。至此,完成了抗晃电智能交流接触器的整体调试,形成了高电压直流起动、低电压直流保持、抗晃电、具有故障延时时间设定、节能无声运行等特点的新型智能电器,具有工作稳定、性价比高等特点。
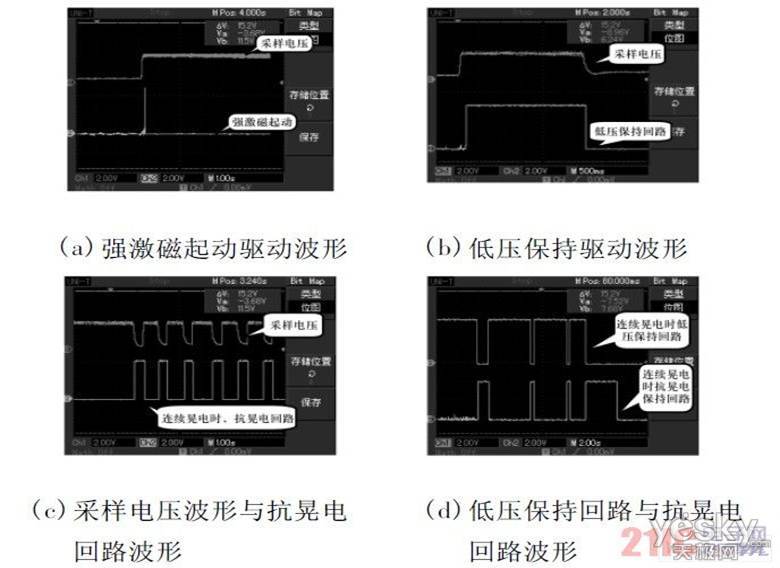
图6 驱动回路测试波形图。
4 结语
该模块具有宽电压输入、交直流通用、直流高电压起动、直流低电压保持、节能无声运行、抗晃电延时分断、断电立即分断、可通信等功能,将其与不同的接触器本体配合,可形成系列抗晃电智能交流接触器产品。(来源:维库)









佚名
最新资讯
热门视频
新品评测
 X
X

 微博认证登录
微博认证登录
 QQ账号登录
QQ账号登录
 微信账号登录
微信账号登录



















